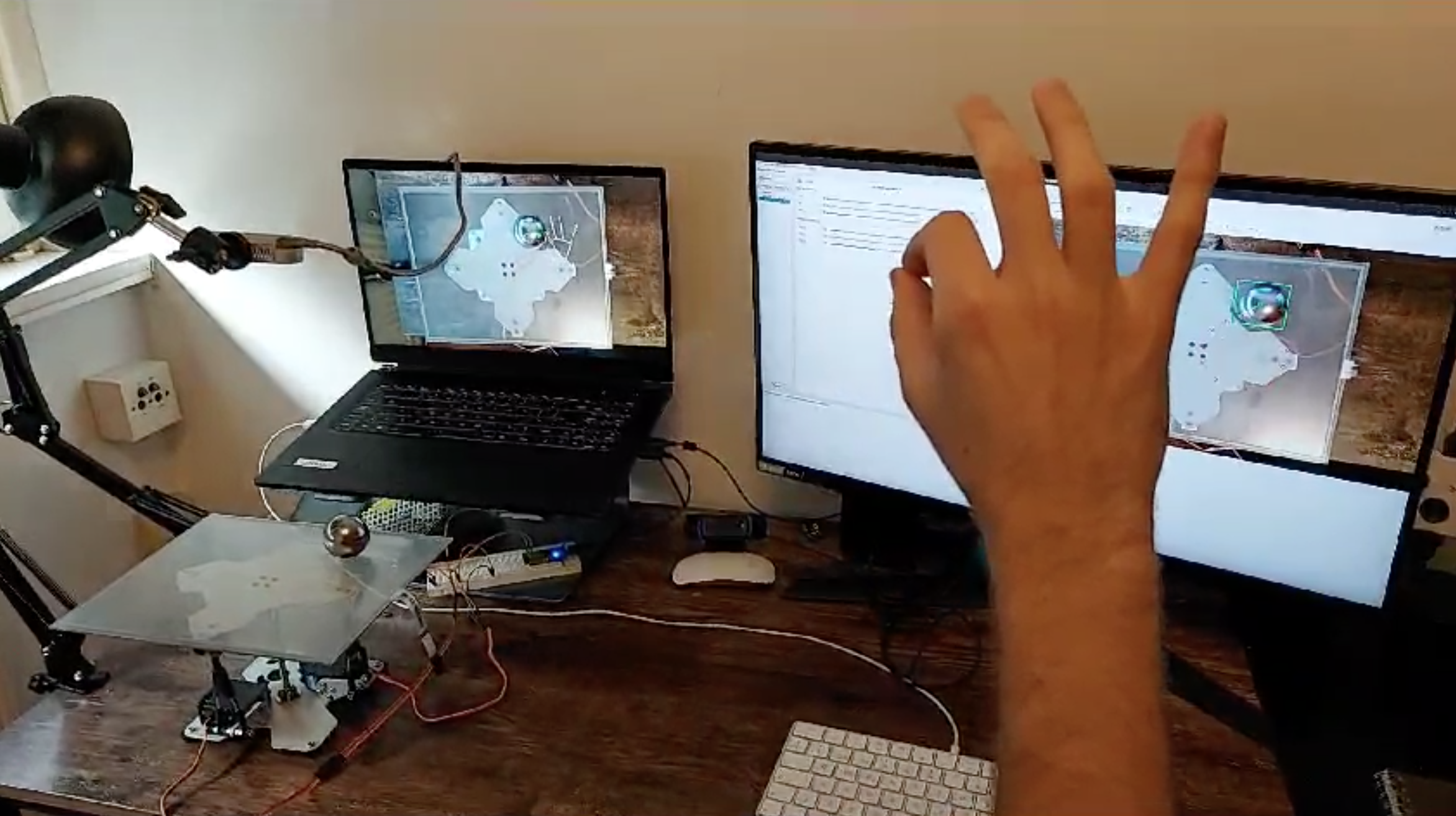
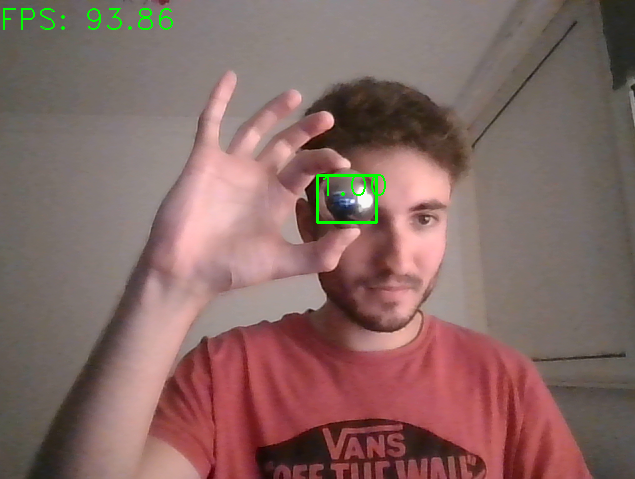
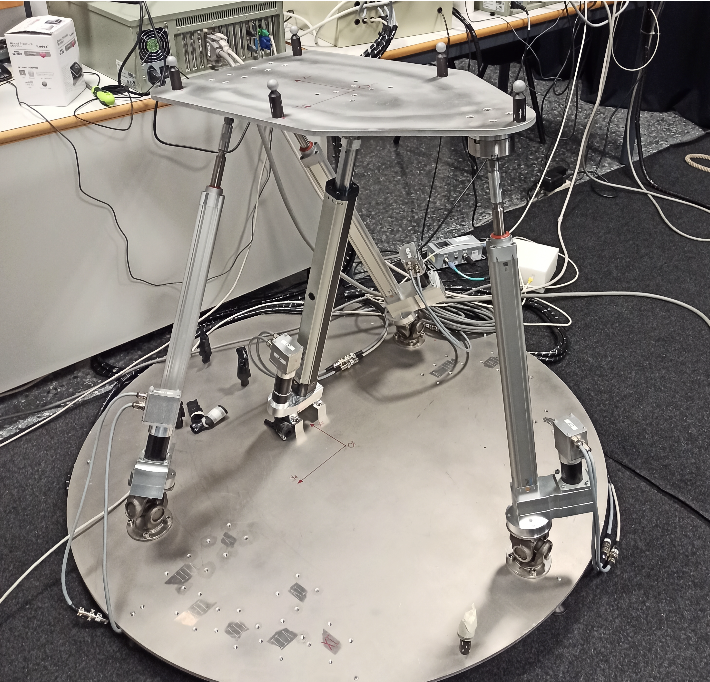
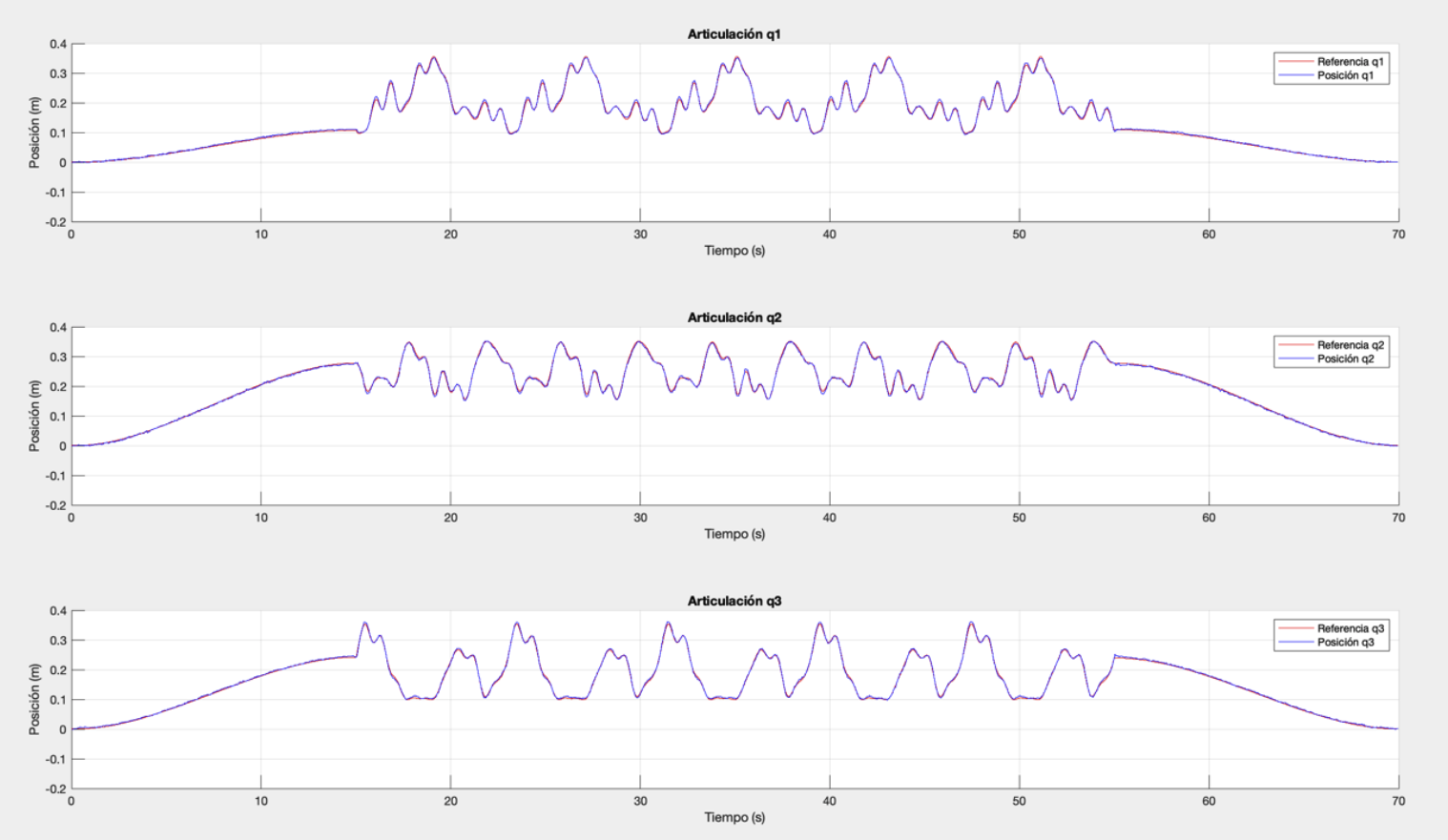
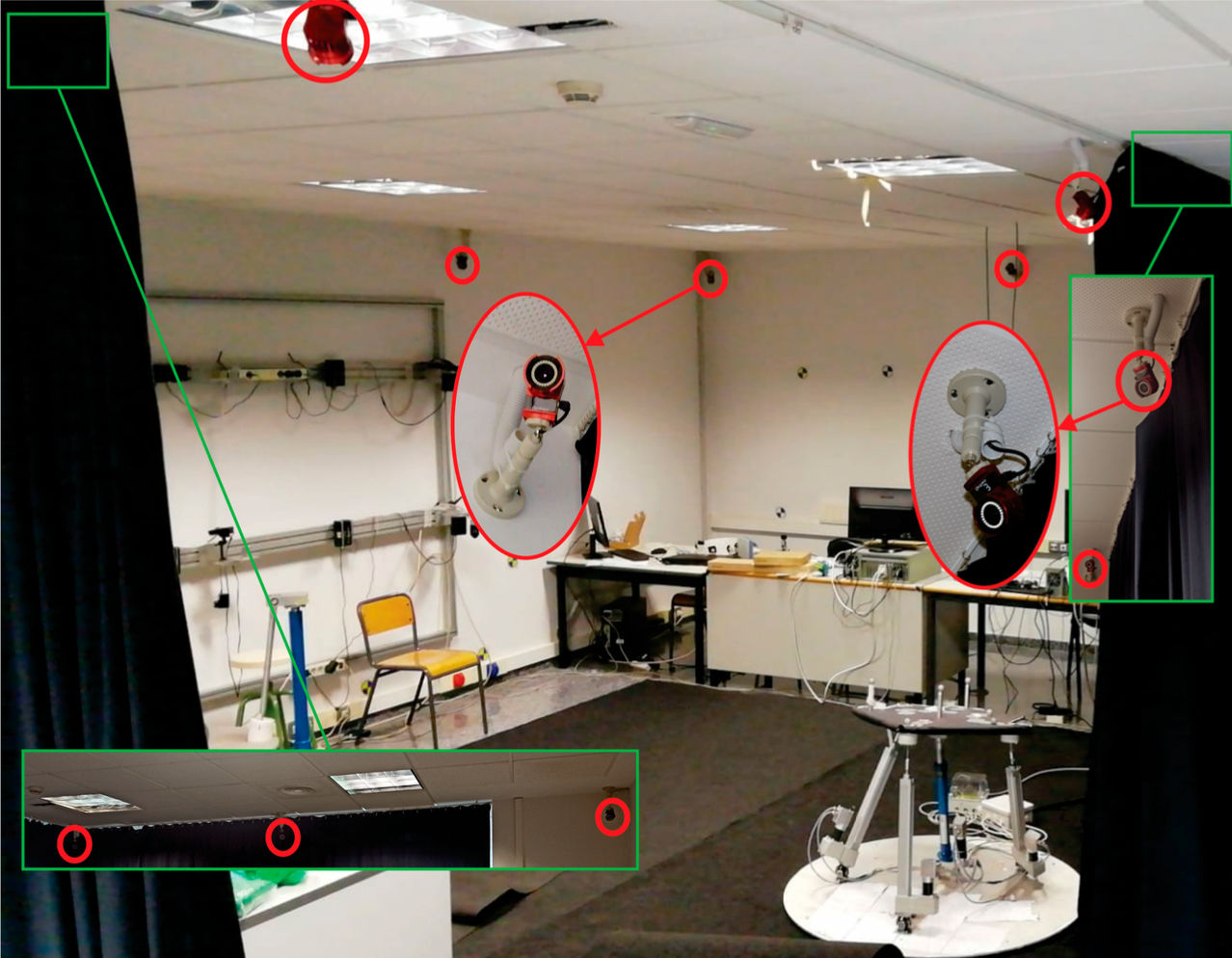
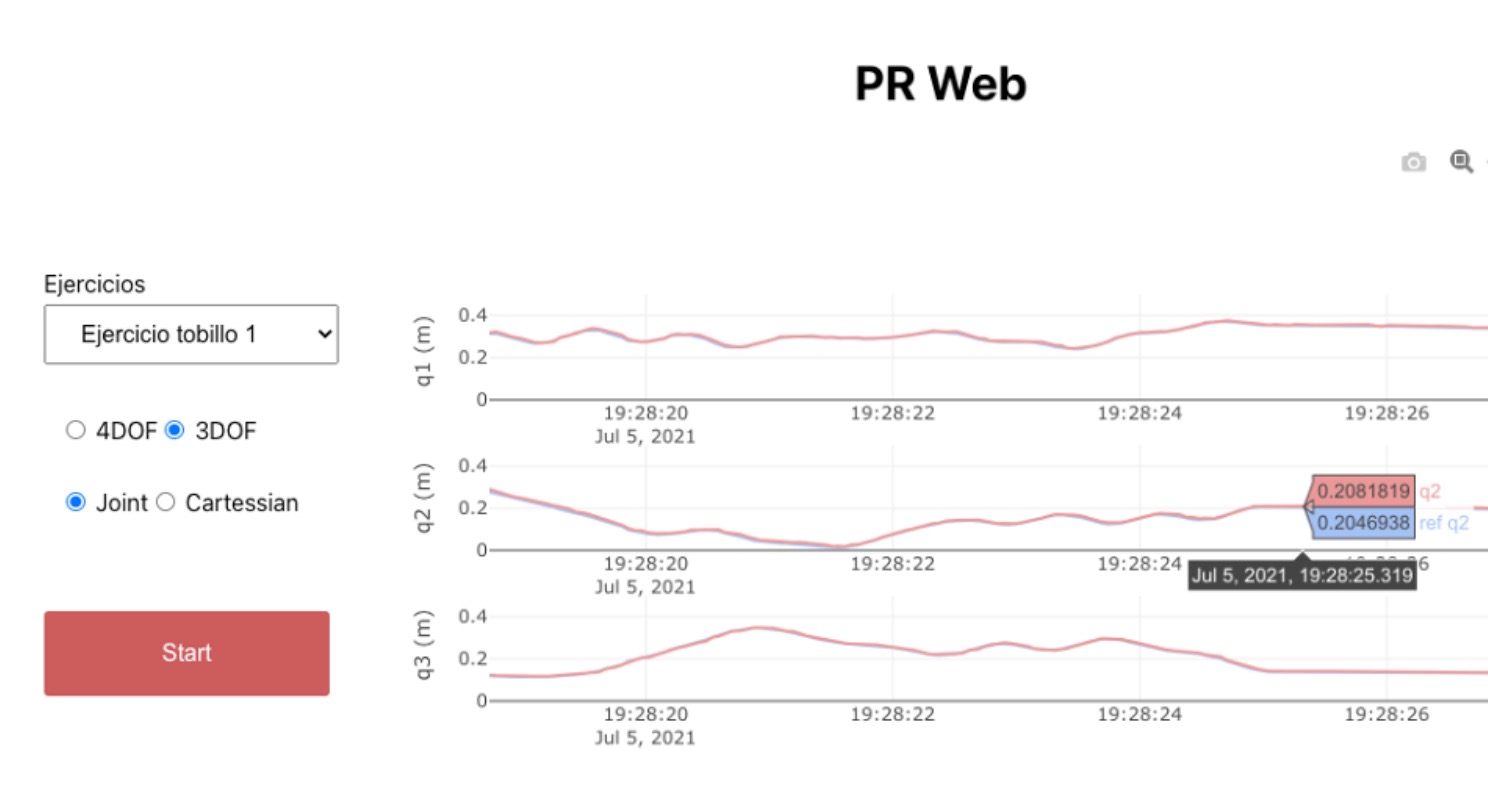
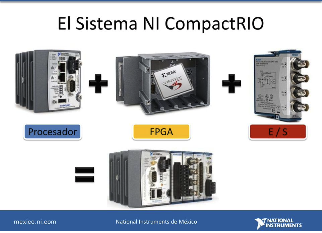
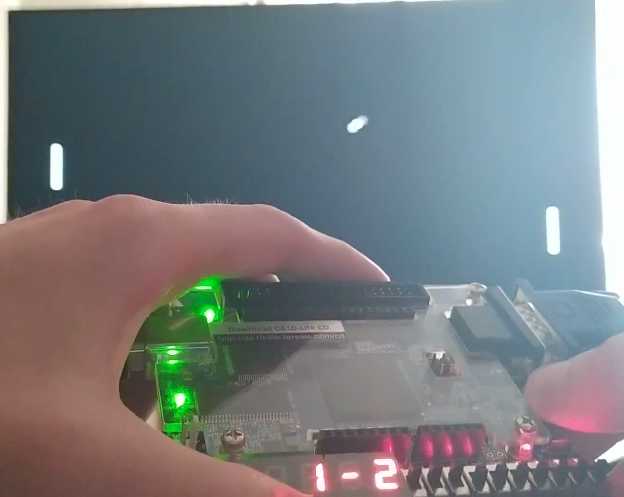
work Ball on Plate with Hand Teleoperation Simple control project as a test bench to integrate different algorithms. ICRA 2023 Showcasing the Shadow teleoperation system in London Accelerate OpenCV with GPU, CUDA and CUDNN Compiling OpenCV 4.8.0 with CUDA and CUDNN support and benchmarking with OpenCV Zoo. ERF 2023 The European Robotics Forum 2023 in Odense, Denmark Dexterity Overview of the Shadow Dexterous Hand ESA-ESRIC Space Resources Challenge 2021 in Netherlands Sensor Integration Overview of a sensor integration for a SLAM architecture Master's Thesis Implementation of modular position/force controllers based on ROS2 for lower member rehabilitation parallel robots Force controller Implementation of an admittance controller as a rehabilitation exercise Deep Reinforcement Learning An implementation of position controllers for parallel robots based on Machine Learning Publication on MDPI Sensors Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity Web GUI to control a ROS2 robot Implementation of a web GUI to control a rehabilitation parallel robot Bachelor's Thesis Implementation of dynamic controllers for a 4DOF parallel robot by a real time embedded industrial controller and an FPGA Pong in an FPGA with VHDL Project to implement the pong game in a Terasic FPGA through VHDL