Bachelor's Thesis
Implementation of dynamic controllers for a 4DOF parallel robot by a real time embedded industrial controller and an FPGA
I remember that before starting my work on the Bachelor’s Thesis I was usnure of focusing my career on robotics although it was something that really interted me before. Due to my interest in the course on Advanced Computer Control I asked the profesor if they were proposing any Thesis related to this in any laboratory. I was lucky enough that it was the case and this is where I started working on parallel robots for rehabilitation purposes with Marina Vallés.
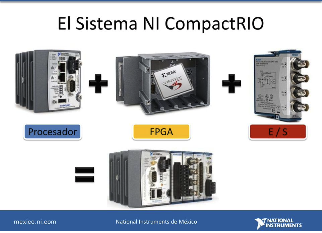
The purpose of this Bachelor’s Thesis was to implement a control architecture for 4DOF parallel robots through a real time embedded industrial controller and an FPGA. This controller was the Compact-RIO from National Instrument whose CPU and FPGA were programmable by the language LAB-VIEW.
I loved solving all sort of problems related to a distributed real time control architecture, such as:
- Implementing a
bufferin the Compact Rio to store trajectory points that were sent form the host and do not lose them. - Measuring the
latencyin the communication between the Compact Rio and the host. - Measuing important
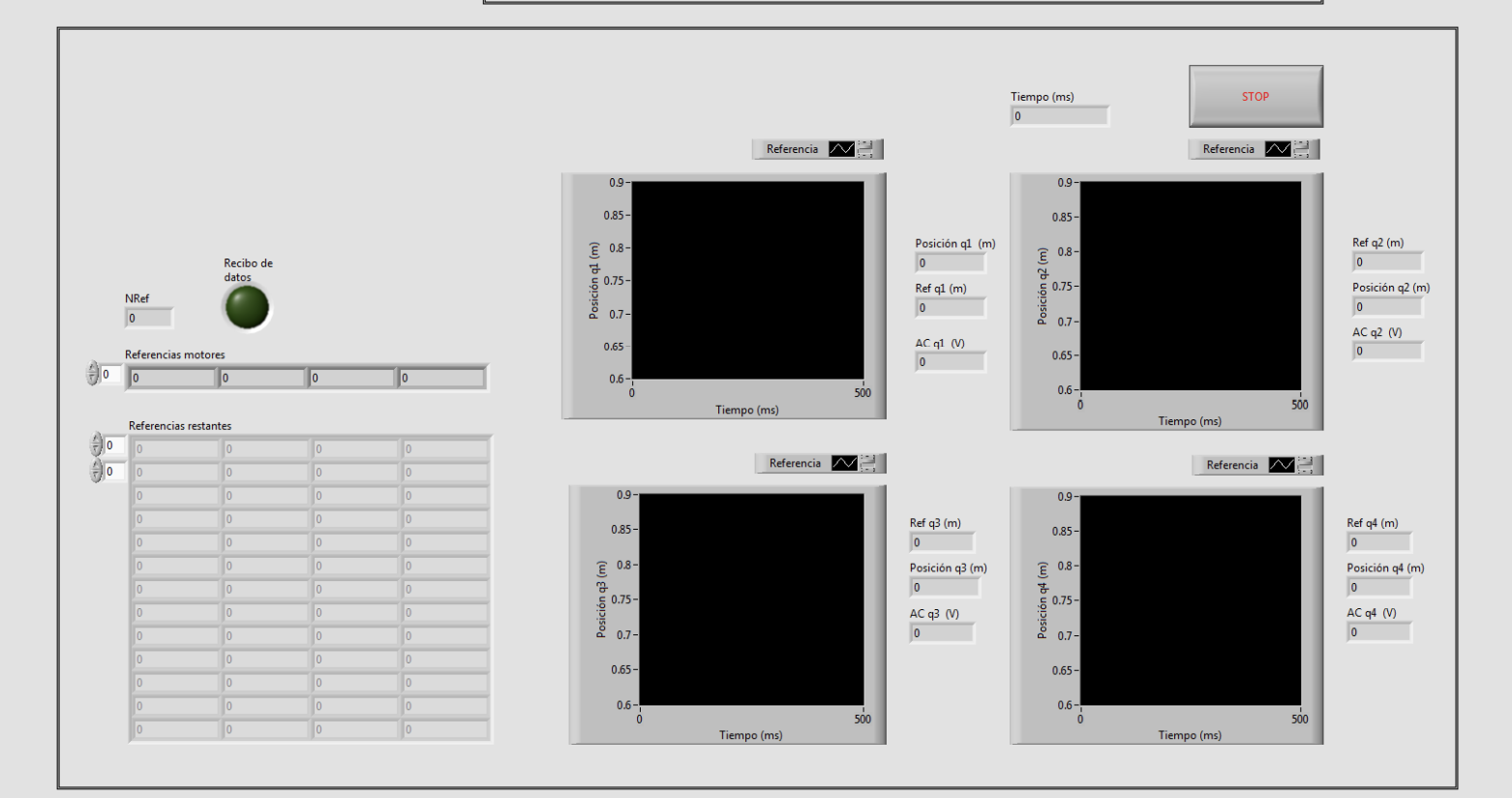
variables in the control looplike: position error, control action, proportional action, derivative action, gravity compensation action, etc. - Implementing a controller that was not only based on a PID, but also was able to
compensate gravity. - Creating an
abstract enough interfaceto be able to test the software and hardware onsimulation(MATLAB / Simulink) as if it was the real robot.
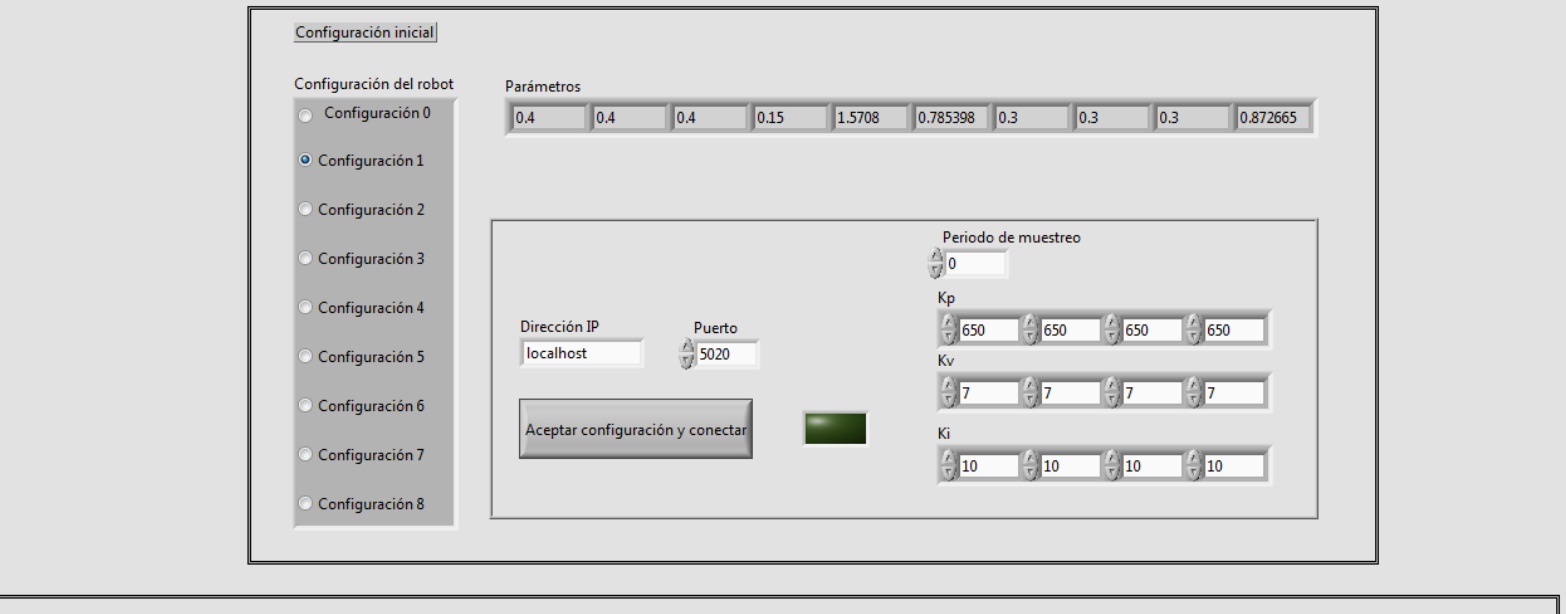
One of the advantages of using LabView is that it is very easy to create a Graphical User Interface to control the robot and also to visualize important variables in the system. This was the result:
Programming in LabView works different than a standard programming language. It basically consists of connecting blocks (functions) through wires. It was a valuable experience, but I personally prefer standard programming languages.