Master's Thesis
Implementation of modular position/force controllers based on ROS2 for lower member rehabilitation parallel robots
I carried my Master’s Thesis in a research laboratory that belonged to a research institute ai2.upv were I was also taking an internship. The aim of the Thesis was to implement modular position/force controllers
based on ROS2 for lower member rehabilitation parallel robots.
After defending the Master’s Thesis, it was qualified with the highest grade 10/10 and with a Special Mention.
I have been discussing in other posts some other implementation, but here you will find a summary of what my Thesis covered.
1. Parallel robots for rehabilitation and control hardware
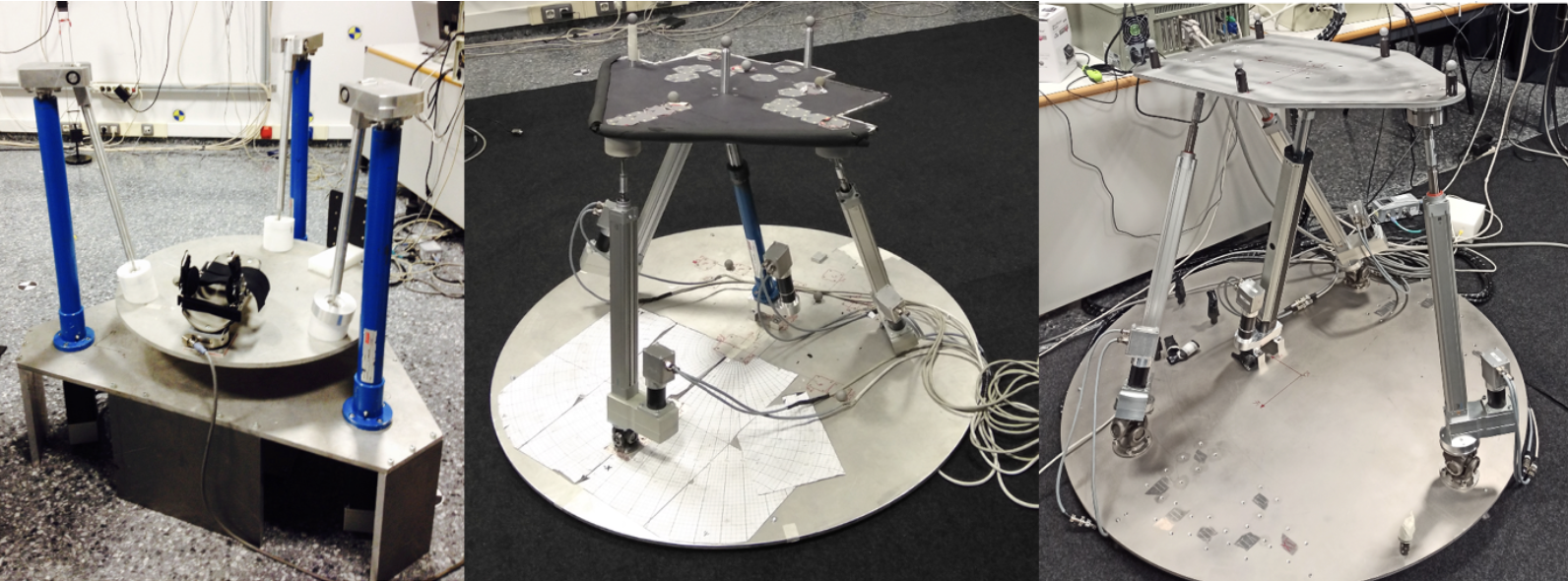
As mention in the title, I worked with parallel robots for rehabilitation purposes of the lower member: ankle 3DOF, knee and ankle 4DOF. Parallel robots have the advantage that they are more accurate and have a better stiffness and strength/weight ratio than serial robots. In the following image you can see the robots I worked with:
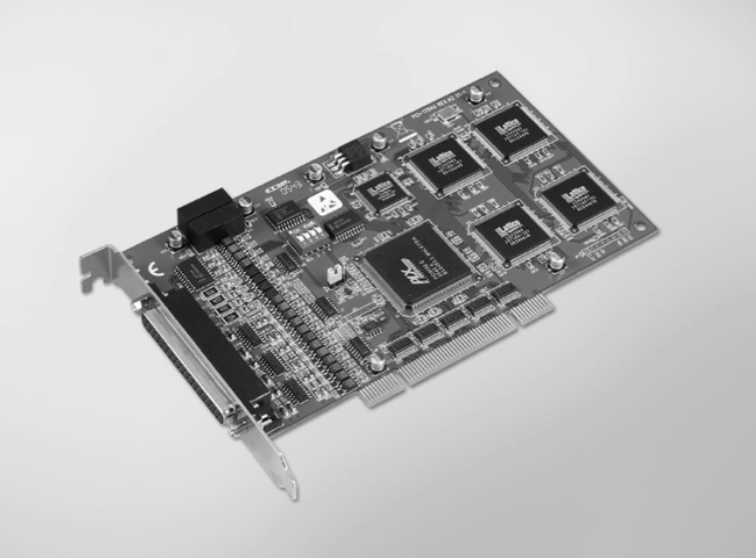
The control hardware was based on an industrial computer, which was running Ubuntu and that contained Data Acquisition Cards to be able to read the encoders of the robots and output the control action:
2. Control architecture - ROS2
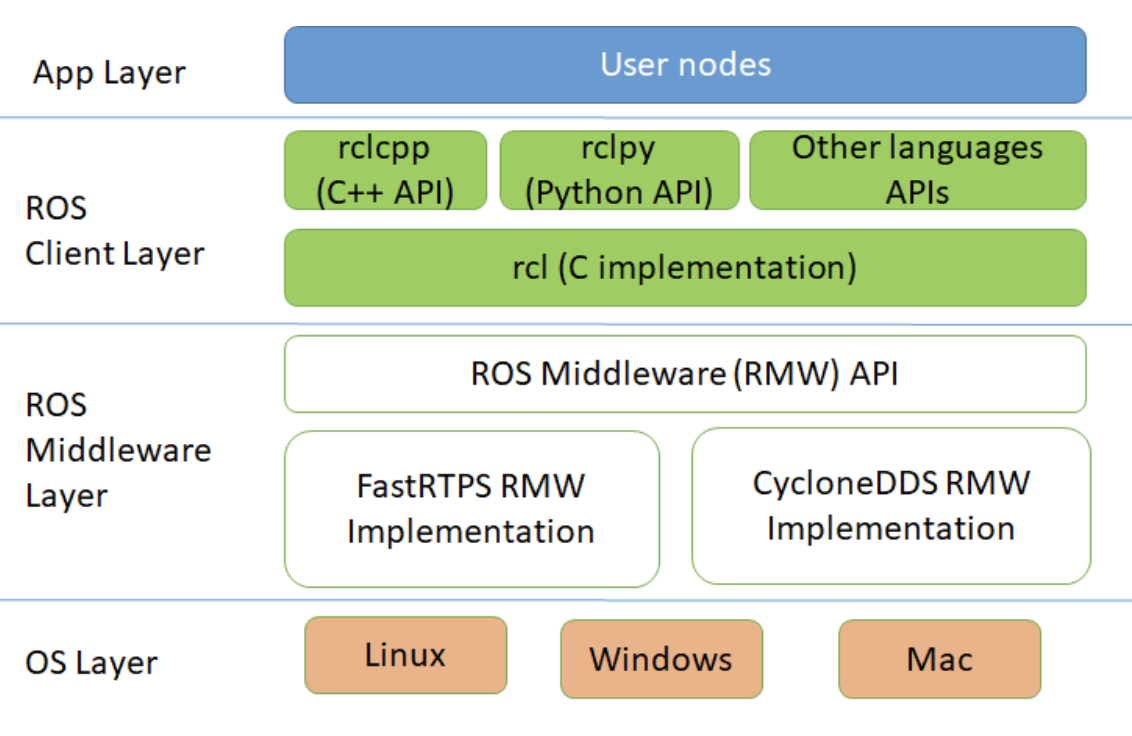
There was a need to implement a control architecture that was based in a real time framework and also that was modular, so that it could be easily adapted to different robots and also so that researches and developers could easily implement newer and more complex controllers than position controllers. For this reason, ROS2 was chosen as the implementation framework. I did this work in 2020 and 2021 so the ROS2 version I worked with was Foxy. ROS2 is able to provide a more deterministic communication in the publisher - subscriber model that offers than ROS. This image shows the layers that ROS2 contains:
3. Position Controller
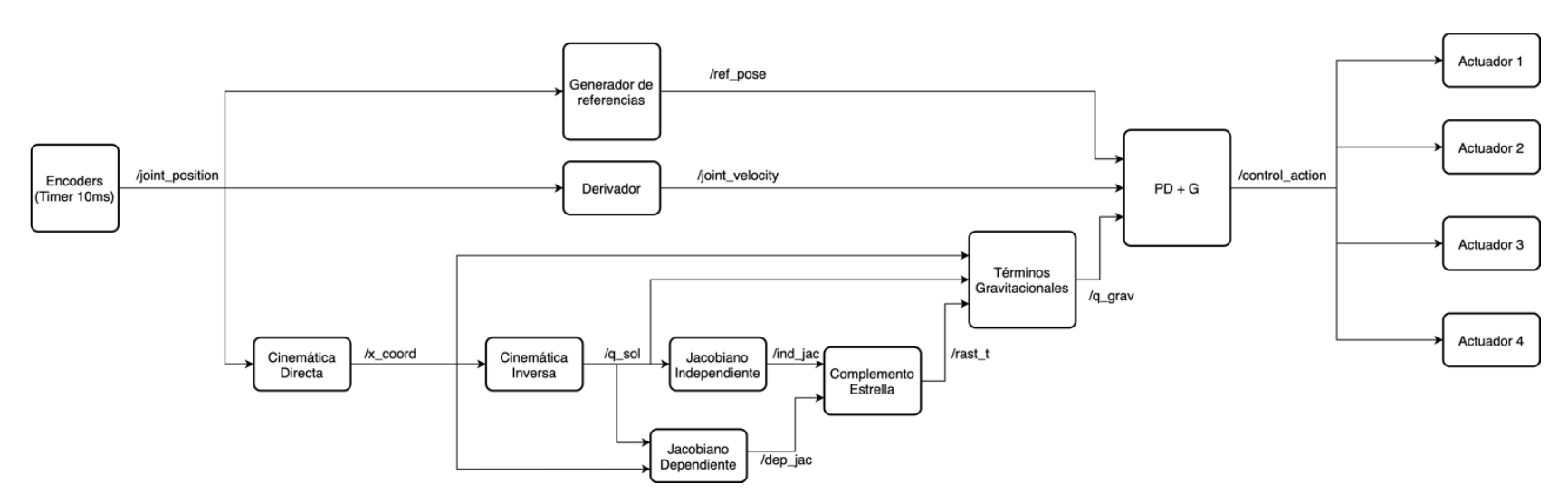
This diagram shows the architecture of the implemented position controller. It is based on a standard PD algorithm and on a compensation of gravity.
Demonstration of the result:
The following plots show important variables that are used to evaluate the control performance. To tune the controller, the accumulation of each position error and also the accumulation of the increment of the control action was used.



4. More complex controllers and GUI
In this post I have only introduced my Master’s Thesis, in the following posts you can also read about particular controllers and implementations that my MS Thesis also covered: